传感器融合市场规模和份额
市场概述
| 研究期 | 2019 - 2030 |
|---|---|
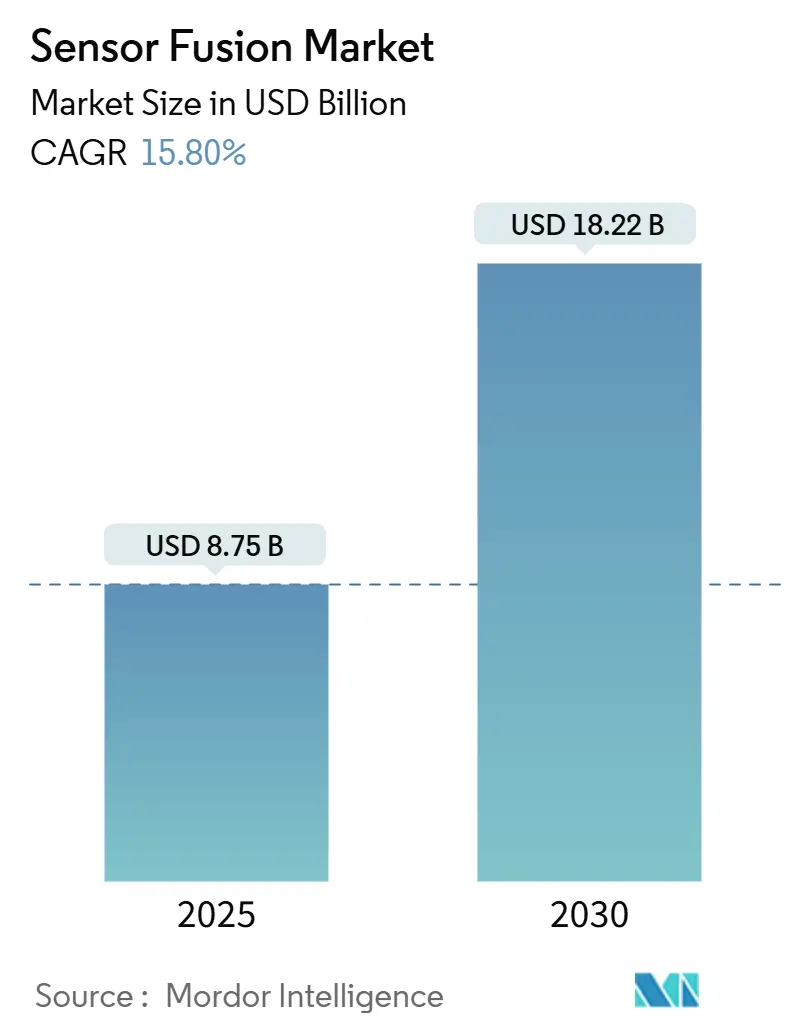
| 市场规模 (2025) | 8.75 十亿美元 |
| 市场规模 (2030) | 18.22 十亿美元 |
| 增长率 (2025 - 2030) | 15.80% CAGR |
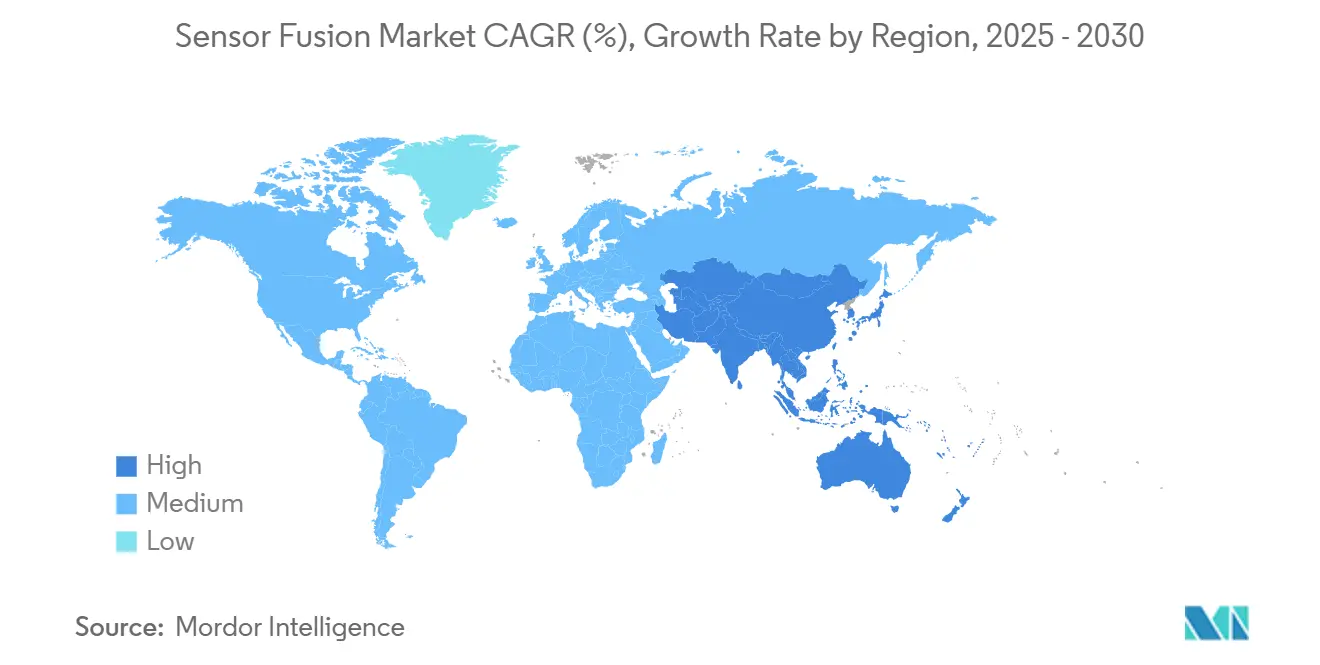
| 增长最快的市场 | 亚太地区 |
| 最大的市场 | 亚太地区 |
| 市场集中度 | 中 |
主要参与者
*免责声明:主要玩家排序不分先后 图片 © Mordor Intelligence。重新使用需遵守 CC BY 4.0 并注明出处。 |
|
Mordor Intelligence传感器融合市场分析
传感器融合市场规模预计在2025年为87.5亿美元,到2030年将达到182.2亿美元,以15.8%的复合年增长率扩张。增长基于自动驾驶系统对可靠、实时感知的需求、更严格的安全法规以及固态激光雷达等关键硬件成本的持续下降。亚太地区凭借中国自动驾驶车辆(AV)测试路线的快速部署和工业自动化项目引领采用。欧洲的安全优先政策和美国的V2X基础设施投资提供了额外动力。硬件仍主导收入,但随着边缘AI将计算从云端转移到终端,软件正在获得越来越多的价值份额,减少延迟和数据隐私风险。雷达-摄像头融合目前是主力配置,但加入激光雷达的三传感器套件扩展最快,随着组件价格下降正在重塑竞争格局。
关键报告要点
- 按地理位置,亚太地区在2024年占据传感器融合市场份额的38%;北美预计到2030年将实现17.2%的复合年增长率。
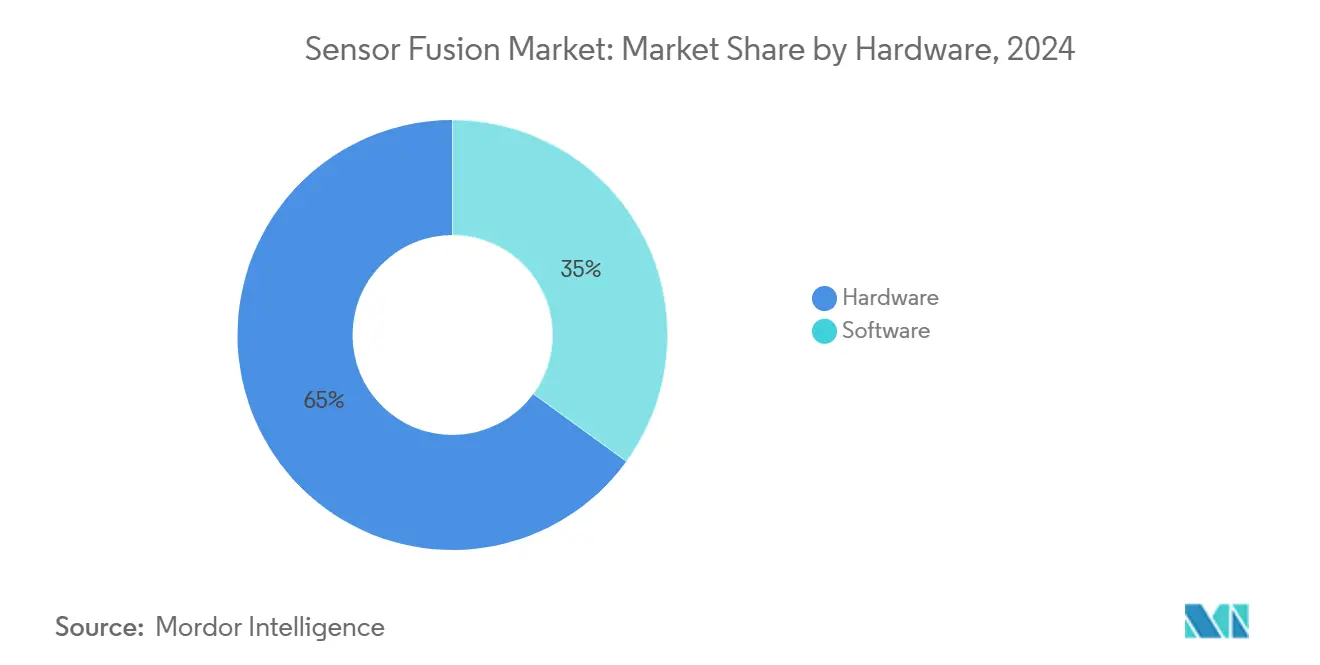
- 按产品类型,硬件在2024年占收入的65%,而软件预计到2030年将以18.9%的复合年增长率加速发展。
- 按融合方法,雷达-摄像头系统在2024年以38%的传感器融合市场份额领先;三传感器(摄像头+雷达+激光雷达)解决方案到2030年将以22.5%的复合年增长率前进。
- 按应用,ADAS在2024年占据55%的收入;L3-L5级自动驾驶到2030年以22.1%的复合年增长率快速发展。
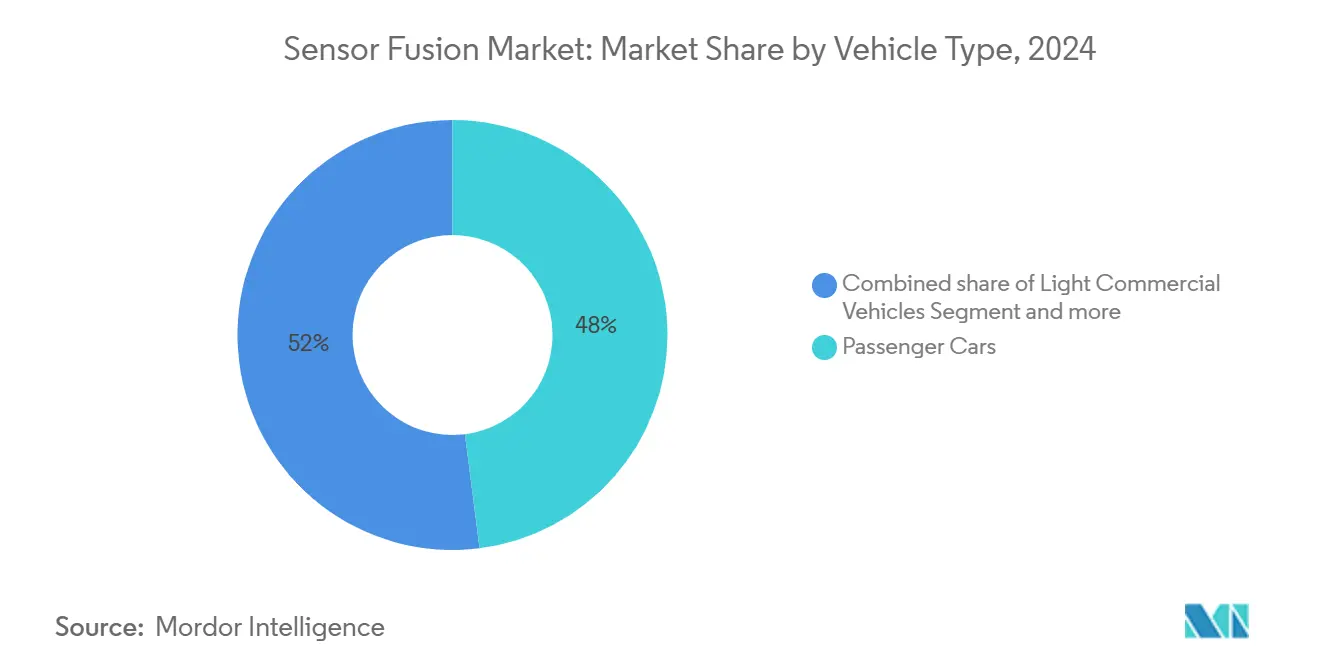
- 按车辆类型,乘用车代表2024年48%的需求,而班车和AGV预计到2030年将以20.4%的复合年增长率增长。
全球传感器融合市场趋势和见解
驱动因素影响分析
| 驱动因素 | (约)对复合年增长率预测的影响% | 地理相关性 | 影响时间线 |
|---|---|---|---|
| 欧洲NCAP五星评级对传感器融合的强制要求加速欧洲原始设备制造商采用 | +3.5% | 欧洲,并影响北美和亚洲 | 中期(2-4年) |
| 固态激光雷达成本下降使中国中端汽车能够配备多传感器套件 | +2.8% | 亚太地区,主要是中国,具有全球影响 | 短期(≤2年) |
| 边缘AI芯片进步允许移动和XR设备实现实时多模态融合 | +2.1% | 全球,北美和亚洲率先采用 | 中期(2-4年) |
| 智能工厂中AMR机器人的部署需要高精度传感器融合 | +1.9% | 亚太地区、北美、欧洲 | 中期(2-4年) |
| 中东国防现代化项目资助多传感器瞄准和导航系统 | +1.2% | 中东,技术转移至全球市场 | 长期(≥4年) |
| V2X数据流集成到融合堆栈以在美国实现L4自动驾驶 | +2.5% | 北美,欧洲和亚洲逐步采用 | 长期(≥4年) |
| 来源: Mordor Intelligence | |||
欧洲NCAP五星评级对传感器融合的强制要求加速欧洲原始设备制造商采用
欧洲NCAP的2025路线图将多传感器感知提升为欧洲汽车制造商不可妥协的安全基线。乘用车平台必须协调摄像头、雷达和越来越多的激光雷达,以通过在日光和黑暗中进行的严格行人检测测试。美国NHTSA的趋同政策强化了全球一致性,使供应商能够在各地区摊销开发成本。Aptiv等一级供应商响应推出可空中升级的ADAS堆栈,降低延迟并在拥挤的城市场景中改善目标检测。监管推动加速软件创新,因为算法升级在无需重新设计硬件的情况下可提供可衡量的安全收益。[1]Aptiv, "Gen 6 ADAS Platform," aptiv.com
固态激光雷达成本下降使中国中端汽车能够配备多传感器套件
汽车级固态激光雷达的单价从早期商业化水平下降约99.5%,使三传感器融合套件在中国庞大的中端市场细分中变得可行。2025年,94款国产车型配备激光雷达,是前一年的两倍。北京2025年4月的L3框架进一步催化需求,让原始设备制造商通过网约车和个人使用项目实现更高自动化程度的货币化。本土供应商禾赛和速腾聚创在中国激光雷达收入排名中仅次于华为,强化了激烈的价格竞争环境,加速全球成本压缩。[2]TDK Corporation, "9-Axis PositionSense IMU With TMR," tdk.com
边缘AI芯片进步允许移动和XR设备实现实时多模态融合
在SoC内嵌入NPU大幅减少推理延迟,将多模态融合工作负载带到设备端。英伟达的Thor芯片在一个封装中为整合的座舱-ADAS计算提供2,000 TOPS。与此同时,TDK的9轴PositionSense™将IMU和TMR传感器结合,延长可穿戴设备运行时间同时提高航向精度。视觉、惯性、深度和音频流的实时融合解锁空间计算用例,从XR头显到情境感知智能手机,无需持续云连接。
智能工厂中AMR机器人的部署需要高精度传感器融合
劳动力短缺和对产能提升的追求推动全球AMR机群到2028年实现18.3%的复合年增长率。工厂机器人依靠融合激光雷达、摄像头、雷达和超声波传感器,在人和机器之间安全导航。诺基亚的MX Context将传感器融合与工业边缘AI配对,提高车间事故检测速度。这种高精度融合框架还缩短集成周期,为系统集成商提供可重用的构建块用于棕地部署。
约束因素影响分析
| 约束因素 | (约)对复合年增长率预测的影响% | 地理相关性 | 影响时间线 |
|---|---|---|---|
| 缺乏统一融合架构标准阻碍互操作性 | -1.8% | 全球,对新兴市场影响更大 | 中期(2-4年) |
| 高计算开销提高非汽车物联网设备BOM | -1.2% | 全球,重点是消费电子市场 | 短期(≤2年) |
| 新兴市场激光雷达渗透率有限限制多模态融合采用 | -0.9% | 南美洲、非洲、东南亚部分地区 | 中期(2-4年) |
| 对云辅助传感器融合管道的数据隐私和网络安全担忧 | -1.5% | 欧洲(GDPR)、北美、全球影响 | 中期(2-4年) |
| 来源: Mordor Intelligence | |||
缺乏统一融合架构标准阻碍互操作性
缺乏通用数据格式和验证框架,原始设备制造商和供应商设计定制融合管道,提高集成成本并阻碍组件互换性。NIST呼吁标准化参考数据集和评估指标以加速跨供应商兼容性。碎片化还使汽车认证复杂化,因为在一个平台上收集的证据可能无法转移到另一个平台,减慢跨型号线的功能推出。[3]NIST, "Standards Needs for Automated Vehicle Technologies," nist.gov
对云辅助传感器融合管道的数据隐私和网络安全担忧
GDPR和类似规则限制AV感知系统捕获的个人身份信息的车外移动。加密和匿名化高带宽激光雷达点云增加计算预算,推动汽车制造商转向边缘中心融合以将原始数据保留在车内。最近的行业调查发现70%的原始设备制造商将网络安全列为其融合堆栈的首要挑战,强调ECU和云节点之间需要安全通信通道。
细分分析
按产品类型:软件释放下一价值层
2024年硬件的传感器融合市场规模为57亿美元,占总支出的65%,凸显摄像头、雷达、激光雷达和IMU在感知中的不可或缺作用。随着车辆超过30个离散传感器,硬件增长持续,但价格侵蚀抑制收入扩张。相比之下,软件切片到2030年以18.9%的复合年增长率扩张,因为OTA更新在销售后释放新收入阶段,这一转变在Aptiv的第六代ADAS推出中已经显现。
复杂的融合算法提升已安装硬件性能,在无物理变化的情况下产生高利润率升级。CEVA的FSP201传感器中枢MCU说明了这一趋势:单个低功耗芯片为无人机和可穿戴设备融合惯性、音频和环境数据,表明优化代码将如何在未来几年持续提升传感器融合市场。
按融合方法:三传感器套件重新定义感知
雷达-摄像头系统在2024年控制38%的传感器融合市场份额,平衡成本和在恶劣天气下的鲁棒性。大多数L2 ADAS堆栈依靠这种配对进行自适应巡航控制和自动制动。然而,随着固态激光雷达价格暴跌,与三传感器平台相关的传感器融合市场规模预计将在2030年前以22.5%的复合年增长率激增。
集成激光雷达增强深度精度和冗余度,对L3及以上自动化至关重要。京瓷的摄像头-激光雷达融合传感器将两种模态压缩到一个外壳中,减少视差同时简化校准需求。这种封装效率对空间和热预算紧张的成本敏感细分至关重要。
按算法类型:学习型模型挑战卡尔曼滤波器
卡尔曼滤波器凭借确定性行为和可认证性以52%的市场份额领先2024年部署。随着边缘计算能力的飙升,与神经网络相关的传感器融合市场规模以24.8%的复合年增长率快速攀升。神经增强滤波器在基准MOT数据集上将估计误差降低多达70%,融合经典模型的可预测性与深度学习的模式匹配强度。
混合堆栈在安全关键环境中受到青睐,因为它们对纯数据驱动网络可能误解的边角案例进行对冲。英伟达的DRIVE平台通过结合卷积骨干与概率跟踪来保持严格功能安全预算内的延迟,体现了这种综合。[4]NVIDIA, "DRIVE Platform Technical Overview," nvidia.com
按应用:更高自动化水平加速需求
ADAS占2024年收入的55%,因为监管强制使AEB和车道保持等功能在欧洲、美国和中国的新车中普及。然而,自动驾驶(L3-L5)是最快的推动者,随着北京、慕尼黑和加利福尼亚出现具体监管路径,以22.1%的复合年增长率扩张。
在汽车之外,XR头显、智能手机和可穿戴设备集成多传感器阵列以支持空间计算。TDK的PositionSense™体现了高效融合如何在减少电池消耗的同时提高沉浸感。在工厂中,AMR依靠融合激光雷达和视觉与人共存,推动工业集成商采用模块化融合框架。
按车辆类型:乘用车仍占主导,机器人快速上升
乘用车拥有2024年48%的销量,因为它们构成全球年度车辆产量的大部分。欧洲NCAP的传感器融合强制要求巩固了这一轨迹。与此同时,随着物流链数字化和劳动力缺口扩大,班车和AGV预计到2030年将实现20.4%的复合年增长率。
传感器融合行业看到重型卡车采用驾驶员监控和车道偏离融合堆栈,而轻型商用面包车为最后一英里送货机器人集成感知。将模块化传感器套件定制到每个工作周期的供应商最有能力捕获这种多样化。
备注: 购买报告后可获得所有单个细分的细分份额
地理分析
亚太地区控制传感器融合市场的最大份额,2024年达到33亿美元,以17.2%的复合年增长率前进。中国的50多个AV测试区,加上工业机器人的国家补贴,创造规模。日本和韩国贡献小型化传感器技术,为全球供应链提供支持。北美传感器融合市场规模虽然落后,但受益于硅谷深厚的AI人才库和美国在高速公路走廊嵌入V2X无线电的推动,这是L4感知冗余的先决条件。
欧洲的方向由严格的安全和数据隐私规则设定。该地区的一级供应商利用精密工程满足欧洲NCAP的多传感器需求,使欧洲平台在功能安全指标上保持领先。在中东,国防现代化推动多传感器瞄准系统;这些项目经常产生双用途知识产权,后来迁移到民用AV。由于激光雷达渗透有限和数据基础设施不太成熟,非洲和南美洲滞后,但智慧城市资金的局部正在试点传感器融合用于交通管理和公共安全无人机。
总的来说,从北京的AV法令到布鲁塞尔的AI法案,区域监管框架决定传感器融合推出的速度和深度。习惯跨大陆认证过程的供应商正在将监管差异转化为服务收入,通过提供与其感知堆栈捆绑的认证工具链。
竞争格局
传感器融合市场围绕全球一级供应商和半导体巨头适度集中。博世、大陆、Aptiv、恩智浦和英飞凌供应大部分硬件和域控制器逻辑,而英伟达和高通提供汽车级AI加速器。垂直整合正在趋势化:博世、台积电、英飞凌和恩智浦共同投资德累斯顿工厂,以确保未来传感器和处理器系列的节点可用性。
以软件为中心的挑战者专注于算法知识产权而非硅。Mobileye和Aurora分别开发针对摄像头主导或激光雷达重度架构优化的感知堆栈。激光雷达新来者禾赛和速腾聚创通过激进定价和快速迭代赢得份额,总共向中国原始设备制造商项目出货超过3000万台。它们的成功迫使既定光学传感器现任者加速降本路线图。
白空间机会在于基于标准的模块化中间件,可缩短跨车辆类别和工业机器人的集成时间。将安全OTA管道与形式验证工具包结合的供应商,一旦功能安全审计在ISO 26262 L4自动化扩展下收紧,将超越纯硬件竞争对手。最后,Lattice Semiconductor等边缘计算供应商推广用于无人机和可穿戴设备嵌入式融合的超低功耗FPGA,拓展汽车之外的可寻址市场。
传感器融合行业领导者
-
罗伯特·博世有限公司
-
大陆集团
-
恩智浦半导体公司
-
意法半导体公司
-
英飞凌科技股份公司
- *免责声明:主要玩家排序不分先后
近期行业发展
- 2025年5月:诺基亚推出MX Context,一个工业边缘传感器融合平台,结合GNSS、RFID和AI进行实时态势感知。
- 2025年4月:京瓷发布世界首款无视差输出和高密度激光扫描的摄像头-激光雷达融合传感器,用于远程障碍物检测。
- 2025年3月:通用原子能和加州大学圣地亚哥分校开设融合数据科学和数字工程中心,以加速AI赋能的融合能源系统设计。
- 2025年1月:TDK发布9轴PositionSense™ IMU + TMR解决方案,以减少移动运动跟踪应用中的漂移和功耗。
全球传感器融合市场报告范围
传感器融合是指合并来自多个传感器的数据以减少机器人导航运动或任务执行中涉及的不确定性的过程。这些传感器包括摄像头、雷达、激光雷达、飞行时间(ToF)、麦克风和惯性测量单元(IMU)。组合传感器数据的三种基本方式是冗余传感器、互补传感器和协调传感器。
市场基于车辆类型和地理位置进行细分。研究包括乘用车、轻型商用车和重型商用车。在其他自动驾驶车辆细分中,评估范围时考虑无人机和自主机器人。研究还评估COVID-19对市场的影响。所有上述细分的市场规模和预测均以价值(百万美元)形式提供。
| 硬件 |
| 软件 |
| 雷达+摄像头融合 |
| 激光雷达+摄像头融合 |
| 雷达+激光雷达融合 |
| IMU+GPS融合 |
| 三传感器融合(摄像头+雷达+激光雷达) |
| 卡尔曼滤波器(EKF、UKF) |
| 贝叶斯网络 |
| 神经网络/深度学习 |
| GNSS/INS集成 |
| 高级驾驶辅助系统(ADAS) | ACC |
| AEB | |
| ESC | |
| FCW | |
| 车道保持辅助(LKA) | |
| 自动驾驶(L3-L5级) | |
| 消费电子(AR/VR、智能手机、可穿戴设备) | |
| 机器人和无人机 | |
| 工业自动化和智能制造 | |
| 国防和航空航天 |
| 乘用车 |
| 轻型商用车 |
| 重型商用车 |
| 其他自动驾驶车辆(班车、AGV) |
| 北美 | 美国 |
| 加拿大 | |
| 墨西哥 | |
| 加勒比海 | |
| 欧洲 | 德国 |
| 英国 | |
| 法国 | |
| 意大利 | |
| 西班牙 | |
| 欧洲其他地区 | |
| 亚太地区 | 中国 |
| 日本 | |
| 韩国 | |
| 印度 | |
| 亚太其他地区 | |
| 南美 | 巴西 |
| 阿根廷 | |
| 南美其他地区 | |
| 中东 | 沙特阿拉伯 |
| 阿联酋 | |
| 以色列 | |
| 土耳其 | |
| 中东其他地区 | |
| 非洲 | 南非 |
| 尼日利亚 | |
| 埃及 | |
| 非洲其他地区 |
| 按产品类型 | 硬件 | |
| 软件 | ||
| 按融合方法 | 雷达+摄像头融合 | |
| 激光雷达+摄像头融合 | ||
| 雷达+激光雷达融合 | ||
| IMU+GPS融合 | ||
| 三传感器融合(摄像头+雷达+激光雷达) | ||
| 按算法类型 | 卡尔曼滤波器(EKF、UKF) | |
| 贝叶斯网络 | ||
| 神经网络/深度学习 | ||
| GNSS/INS集成 | ||
| 按应用 | 高级驾驶辅助系统(ADAS) | ACC |
| AEB | ||
| ESC | ||
| FCW | ||
| 车道保持辅助(LKA) | ||
| 自动驾驶(L3-L5级) | ||
| 消费电子(AR/VR、智能手机、可穿戴设备) | ||
| 机器人和无人机 | ||
| 工业自动化和智能制造 | ||
| 国防和航空航天 | ||
| 按车辆类型 | 乘用车 | |
| 轻型商用车 | ||
| 重型商用车 | ||
| 其他自动驾驶车辆(班车、AGV) | ||
| 按地理位置 | 北美 | 美国 |
| 加拿大 | ||
| 墨西哥 | ||
| 加勒比海 | ||
| 欧洲 | 德国 | |
| 英国 | ||
| 法国 | ||
| 意大利 | ||
| 西班牙 | ||
| 欧洲其他地区 | ||
| 亚太地区 | 中国 | |
| 日本 | ||
| 韩国 | ||
| 印度 | ||
| 亚太其他地区 | ||
| 南美 | 巴西 | |
| 阿根廷 | ||
| 南美其他地区 | ||
| 中东 | 沙特阿拉伯 | |
| 阿联酋 | ||
| 以色列 | ||
| 土耳其 | ||
| 中东其他地区 | ||
| 非洲 | 南非 | |
| 尼日利亚 | ||
| 埃及 | ||
| 非洲其他地区 | ||
报告中回答的关键问题
是什么推动了传感器融合市场的快速增长?
严格的安全法规、固态激光雷达价格下降以及能够实现实时多模态融合的边缘AI芯片进步正在推动市场到2030年实现15.8%的复合年增长率。
哪个地区今天领导传感器融合市场?
亚太地区占据38%的收入份额,受中国大规模AV试点和激进工业自动化投资的推动。
软件收入如何比硬件扩张更快?
空中升级和AI增强融合算法为已安装传感器添加新功能,允许供应商在不更换硬件的情况下将持续性能升级货币化。
为什么三传感器融合套件获得关注?
结合摄像头、雷达和激光雷达可提供更高的深度精度和L3-L5自动驾驶所必需的冗余度,特别是现在激光雷达成本已下降99.5%。
更广泛的传感器融合采用的主要障碍是什么?
由于缺少架构标准导致的互操作性差距、物联网设备中的高计算开销、某些地区有限的激光雷达接入以及不断上升的数据隐私和网络安全要求减缓推出。
汽车之外哪个工业细分看到强劲的传感器融合采用?
智能工厂中的自主移动机器人正在采用用于导航的高精度融合,预计到2028年将以18.3%的复合年增长率增长。
页面最后更新于: